
My latest NXT project is a robotic arm, which sorts lego balls.
Pictures

Video
Description
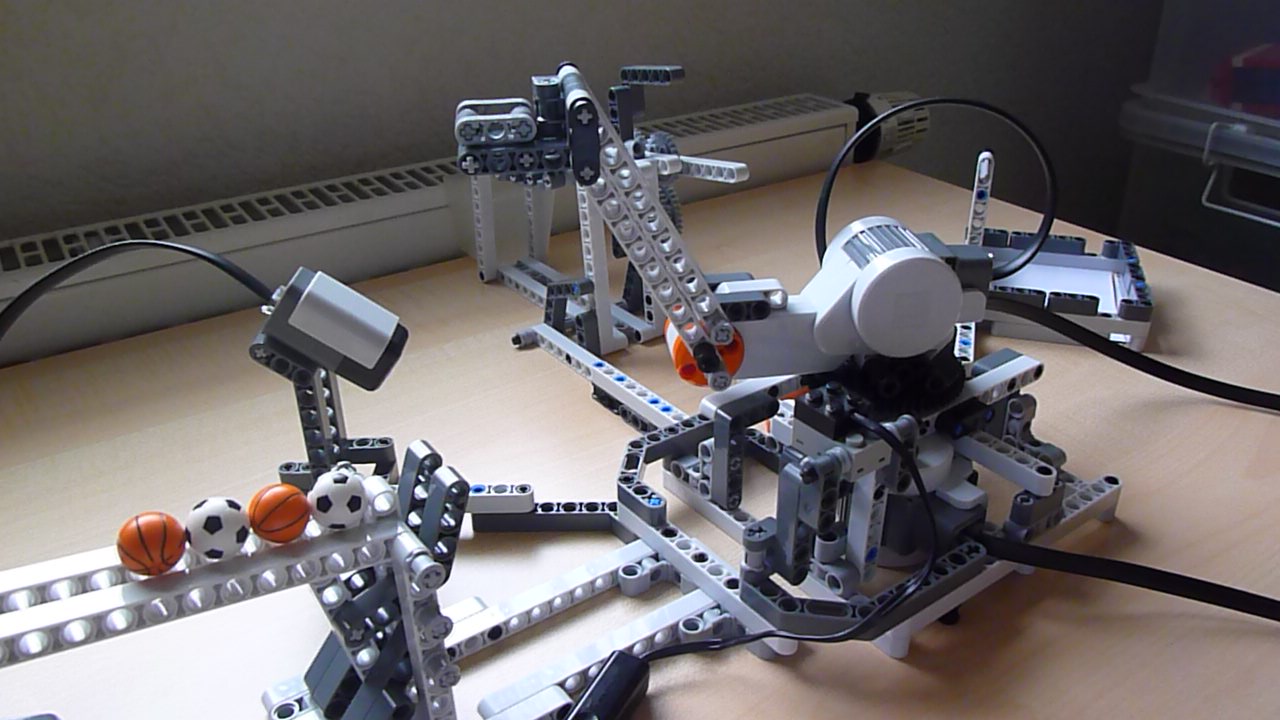
The arm can rotate and move up and down. It first grabs a ball from the dispenser, which pushes one ball from the shelf when the arm hits the beam at the front. This is done mechanically via a construction of beams.
Then the robot shows the ball to a color sensor, which detects whether it’s a soccer ball (white) or a basketball (orange).
If it is a basketball, it is dropped into the basketball bin. There is a special beam which blocks the way of the ball, but not the way of the robot, therefore pushing it of the arm.
If it’s a soccer ball, it is dropped on the soccer ball shelf using a similar principle. The robot waits until three balls are on the shelf, then it ‘flushes’: the Roboduck presses another beam, which causes the soccer shelf to release the balls into a plastic container.
After the robot dropped of the ball it starts the whole process from the beginning.
Trivia
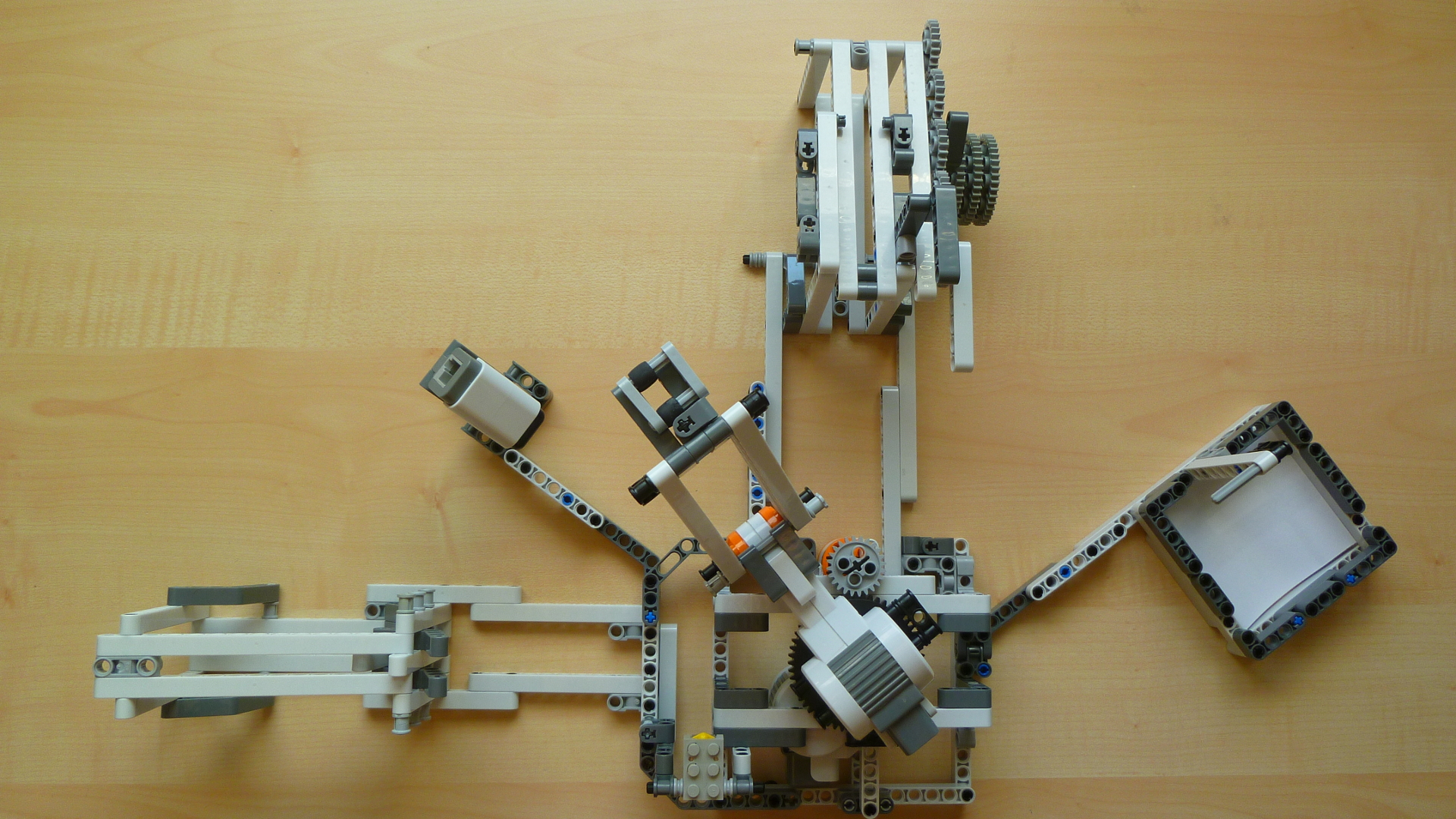
- All two motors operate the arm. Putting balls on the tip of the arm, dropping of balls and flushing the soccer shelf is done mechanically via gears and beams.
- It’s called Roboduck because the arm reminds me of a duck.
- All parts of the robot are attached to the arm, so the arm can’t push them away. The precise positioning of all components is really important.
- The only things which are not from lego are the plastic container in which I use to keep the balls and a piece of paper inside the basketball bin which is used to prevent the balls from jumping out of the bin again.